Scientific Publications
Smart Insole Sensor for vGRF Measurement
This article presents a smart insole sensor capable of providing a reliable and valid measurement for the vGRF. Regarding the hardware, the wearable comprises piezoresistive force sensors distributed along with the insole, which provides plantar force distribution measurements, and an embedded system for data collection and communication worn on the lower leg. This research provides an advancement toward developing a wearable monitoring system for vGRF reporting in real-life scenarios.
Work presented as an oral exposition by my colleague Leonardo Bravo Thais, at the 9th International Symposium on Sensor Science in Warsaw, Poland.
Abstract Paper Paper (see page 28) Conference link
A Deeper Look into Aleatoric and Epistemic Uncertainty Disentanglement
Neural networks are ubiquitous in many tasks, but trusting their predictions is an open issue. Uncertainty quantification is required for many applications, and disentangled aleatoric and epistemic uncertainties are best.
In this paper, we generalize methods to produce disentangled uncertainties to work with different uncertainty quantification methods, and evaluate their capability to produce disentangled uncertainties.
Our results show that: there is an interaction between learning aleatoric and epistemic uncertainty, which is unexpected and violates assumptions on aleatoric uncertainty, some methods like Flipout produce zero epistemic uncertainty, aleatoric uncertainty is unreliable in the out-of-distribution setting, and Ensembles provide overall the best disentangling quality. We also explore the error produced by the number of samples hyper-parameter in the sampling softmax function, recommending N > 100 samples.
We expect that our formulation and results help practitioners and researchers choose uncertainty methods and expand the use of disentangled uncertainties, as well as motivate additional research into this topic.
Paper Poster CVPR Proceedings LXAI Proceedings
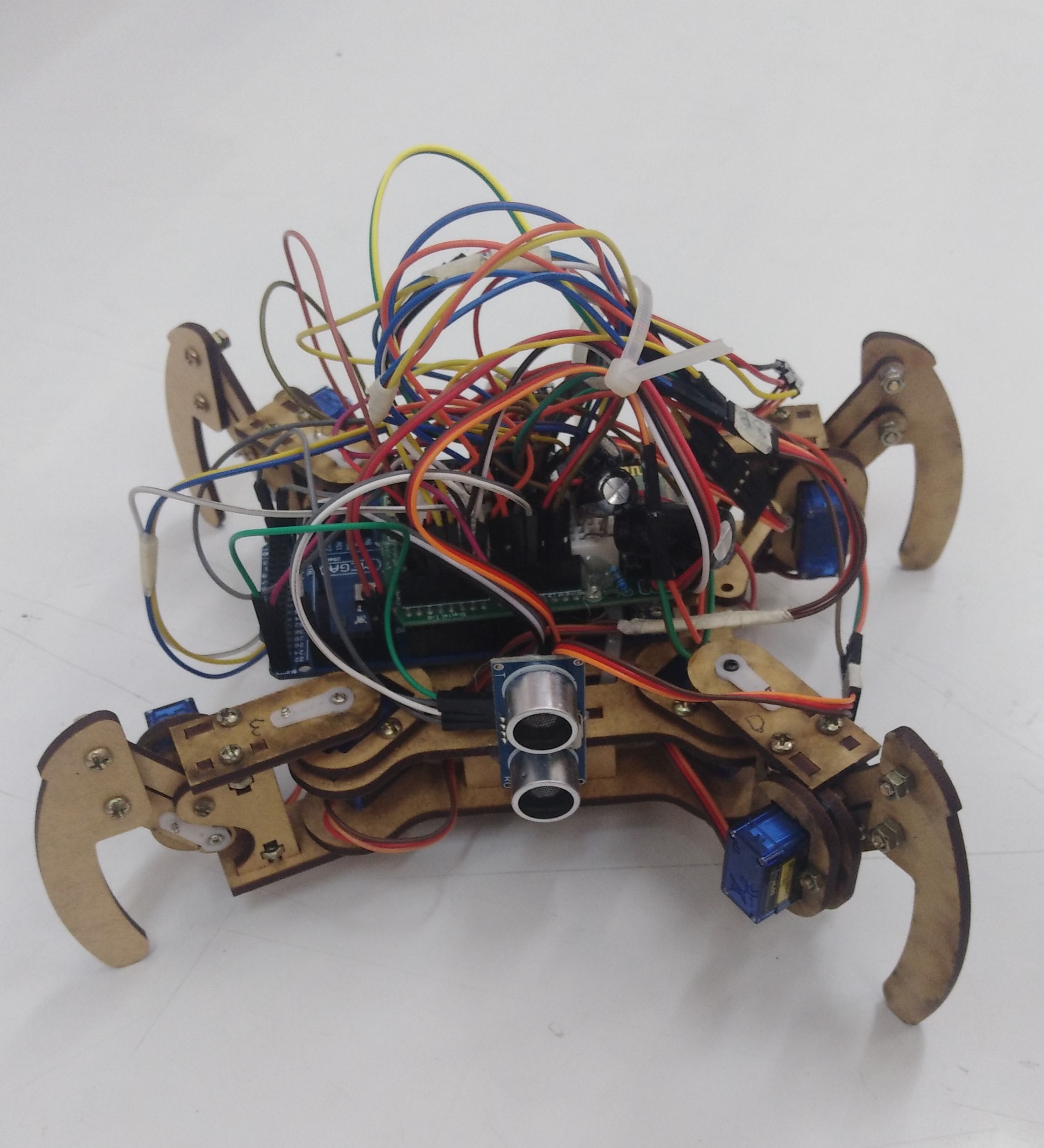
Intelligent spider robot for detecting anti-personnel metallic landmines in uneven terrain
For my bachelor and professional degree thesis, I designed a spider robot that can move through irregular terrain carrying a landmine sensor. The design included the mechanical structure, the electronics, and the control of the robot. I proposed an innovative algorithm for controlling the joints to make the robot learn to walk, using genetic algorithms and ensemble learning.
The proposed algorithm allows training an intelligent agent to maximize a reward metric without applying reinforcement learning techniques, which are usually the way to solve this type of problem.
To test the designed gait learning algorithm, I used a scaled prototype maintaining the same geometry and DOF of the robot designed for moving the landmine sensor. For my thesis, I improved the spider robot I made in 2018.
I obtained my Bachelor’s degree on September, 2019. After that, my thesis was improved and then presented to obtain my Professional Degree of Mechatronics Engineer on November, 2020.
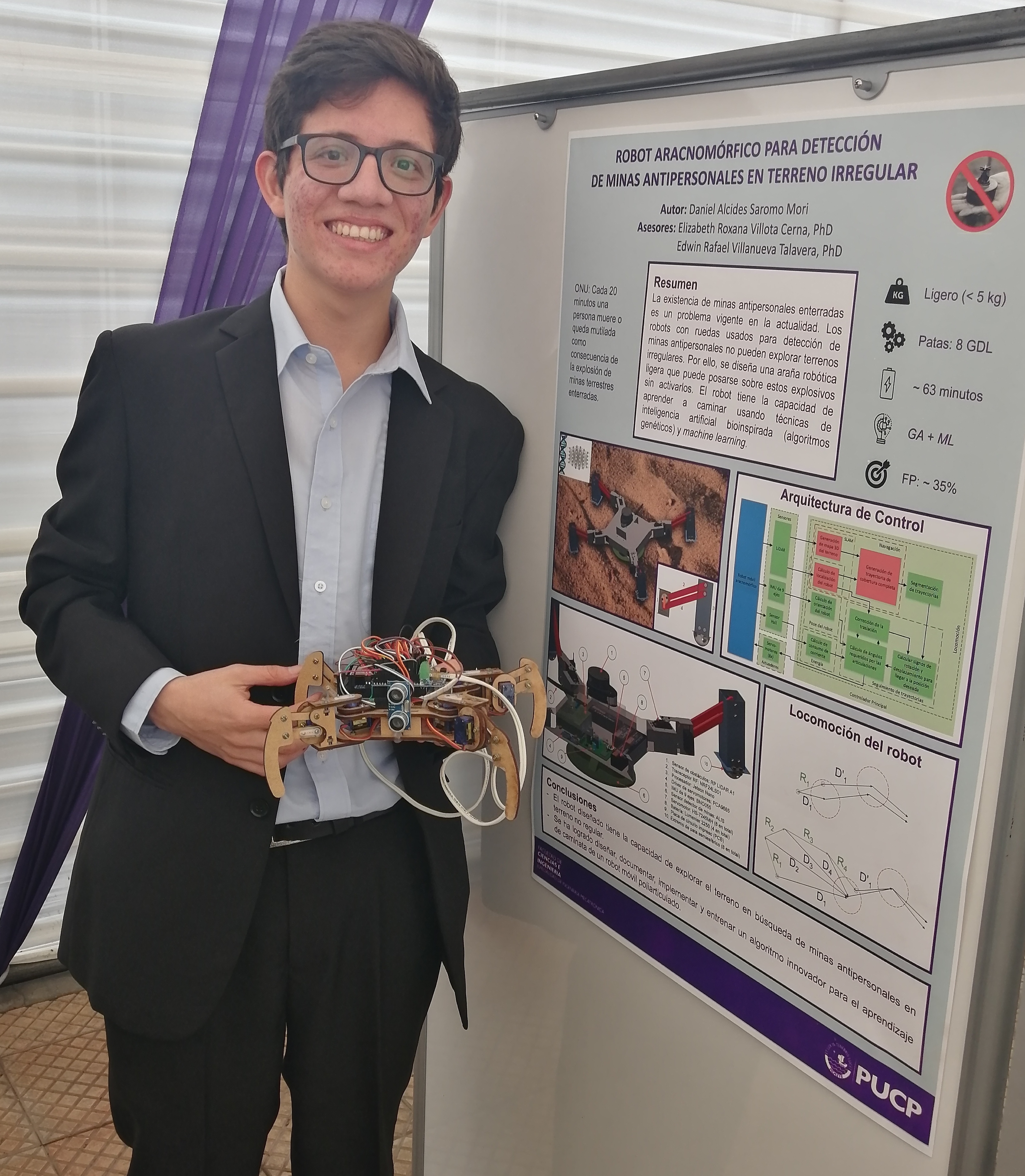
My thesis received the following national and international awards:
- Best bachelor’s thesis and poster presentation at the PUCP Mechatronics Workshop of the semester 2019-1.
- Innovation Recognition Award at the International Mechanical Engineering Congress & Exposition (IMECE) 2019, which was celebrated in Utah, USA.
- Extraordinary Support Funding for Undergraduate Research Thesis.
- Degree thesis unanimously awarded by the tribunal with the qualification of outstanding.
You can watch here the defense of my professional degree thesis.

Thesis document (English abstract available) Video of Professional Degree Thesis defense (in Spanish) Video of Bachelor Thesis defense (in Spanish) Poster of Bachelor Thesis (in Spanish)
Smart Sensor Calibration with Auto-Rotating Perceptrons
Sensor calibration is vital to have valid measurements of physical activities. In this paper, we deal with adjusting the signal from a wearable force sensor against a reference scale. By using a few samples and data augmentation, we trained a neural-based regression model to correct the wearable output. For this task, we tested the novel Auto-Rotating Perceptrons (ARP). We found that a neural ARP model with sigmoid activations can outperform an identical neural network based on classic perceptrons with sigmoid and even ReLU activation.
When changing classic perceptrons to ARP, the test loss of the sigmoid networks was reduced by a factor of 15 at the cost of increasing the execution time by ∼12% (see bar graph below).


Work presented as an oral exposition and poster session at the LatinX in AI Workshop co-located with ICML 2020.
Erratum: In the oral presentation video, when I say “without learning the inference structure of the perceptron”, I mean “without altering the inference structure learned by the perceptron”.
Paper Oral presentation Q&A Slides LXAI Proceedings
Auto-Rotating Perceptrons
This paper proposed an improved design of the perceptron unit to mitigate the vanishing gradient problem at deep neural networks. The results show that models with Auto-Rotating Perceptrons (ARP) can achieve better learning performance than equivalent networks with classic perceptrons.
The modification consists of adding the scalar \( \rho \) to the value that enters the activation function, as is depicted below. Geometrically, it represents a rotation of the hyperplane present in the latent space of the perceptron. The ARP is a generalization of the classic perceptrons.


Work presented as an oral exposition and poster session at the LatinX in AI Workshop co-located with NeurIPS 2019.